
MapleSim apre nuove prospettive nella simulazione real-time Hardware-in-the-Loop per i rover planetari
Nel settore spaziale, la progettazione, la costruzione e il collaudo dei prototipi di rover sono estremamente costose e tipicamente il collaudo di sistema non avviene che nelle ultime fasi del processo di progettazione/collaudo, determinando un lungo tempo di sviluppo. In risposta a tale problema, il Dr. Amir Khajepour, titolare di una Cattedra di Ricerca Canadese nei Sistemi Veicolari Meccatronici e Professore di Ingegneria nel dipartimento di Ingegneria Meccanica e Meccatronica dell’Università di Waterloo (UW) e il suo gruppo hanno collaborato con l’Agenzia Spaziale Canadese (CSA) e Maplesoft al fine di sviluppare una piattaforma di test Hardware-in-the-Loop (HIL) per i rover planetari ad alimentazione solare.
Il loro approccio permette di collaudare i componenti all´interno di un loop di simulazione prima che sia disponibile un prototipo completo del rover. Esso crea essenzialmente un ambiente di collaudo virtuale per il componente sotto test, ´ingannandolo´ e facendogli credere che stia funzionando all´interno di un prototipo completo. Usando MapleSim, il tool di modellazione e simulazione di Maplesoft, sono stati creati modelli ad alta fedeltà ed efficienti sul piano computazionale per questa applicazione real-time.
Utilizzando questa piattaforma di test, è possibile modellare scenari che sono difficili da replicare in una configurazione di laboratorio, come l´ambiente marziano, o componenti che non sono ancora disponibili, mentre i componenti hardware che sono disponibili possono comunicare con questi modelli software per simulazioni real-time. L´obiettivo è aggiungere progressivamente componenti hardware al loop di simulazione, mano a mano che diventano disponibili. In questo modo, il collaudo del sistema avviene anche senza tutti i componenti hardware, colmando la distanza fra le fasi di progettazione e collaudo.
Il principale vantaggio di questo approccio è che riduce significativamente il tempo di sviluppo complessivo del progetto. Inoltre, permette il collaudo dei componenti in scenari pericolosi senza il rischio di danneggiare il prototipo completo del rover.
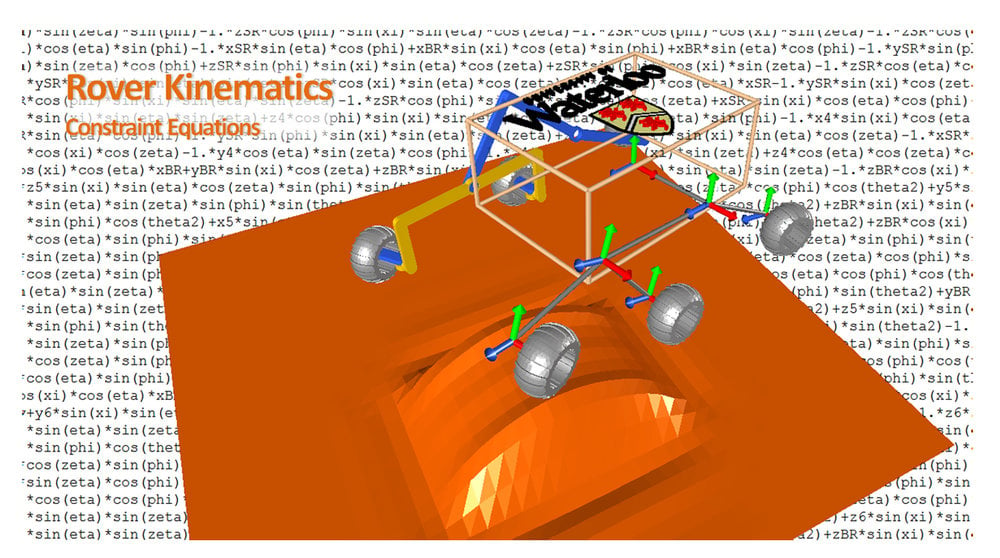
Cinematica del rover
Oltre che per simulare la dinamica del rover, l´ambiente di modellazione MapleSim è stato usato anche per generare automaticamente le equazioni cinematiche del rover stesso. Tali equazioni hanno quindi formato la base per altri task all´interno del progetto, come le simulazioni HIL, la pianificazione dei percorsi e l´ottimizzazione della potenza. La configurazione modulare del sistema permette agli utenti di modificare rapidamente la configurazione del rover ed esplorare approcci differenti in breve tempo.
Framework Hardware in the Loop
La figura 2 mostra una visione d´insieme della piattaforma di test. Le informazioni relative a posizione, orientazione, inclinazione, velocità e consumo di potenza del rover (ottenute dai modelli dinamici del rover) sono usate come input dei modelli software. Una libreria di componenti del rover è stata sviluppata in MapleSim ed importata in LabVIEW Real-Time, dove sono stati sviluppati il programma HIL e la GUI delle simulazioni. Il programma è stato quindi caricato nel computer embedded all´interno del PXI National Instruments, dove sono state stabilite le comunicazioni fra i componenti hardware e i modelli software ed è stata eseguita la simulazione real-time.
»A causa della natura multidominio del sistema (meccanica, elettrica e termica), era preferibile modellare tutti i componenti all´interno di un unico ambiente di modellazione, in modo da potere individuare facilmente le relazioni critiche. Inoltre, l´efficienza computazionale è cruciale nelle simulazioni real-time», ha affermato il Dr. Khajepour. »Abbiamo trovato in MapleSim l´ambiente ideale per questa applicazione grazie alle sue capacità multidominio, all´uso della semplificazione simbolica per un´efficienza computazionale più elevata e alla facilità di connettività verso LabVIEW».
Oltre ad utilizzare la libreria di componenti incorporata di MapleSim, è stato possibile sviluppare facilmente anche componenti custom. Utilizzando il Custom Component Block di MapleSim è stato implementato un modello per stimare la radiazione solare che una superficie inclinata riceverebbe su Marte. Tale modello ha tenuto conto della posizione del sole, della posizione latitudinale e longitudinale del rover e della sua orientazione ed inclinazione durante lo spostamento dal punto A al punto B. Esso è stato quindi utilizzato insieme a un modello di array solare per stimare la generazione di potenza del rover durante il giorno.
»La natura intuitiva di MapleSim ha permesso al mio gruppo di creare modelli ad alta fedeltà in un breve periodo di tempo», ha affermato il Dr. Khajepour. »Ciò ha giocato un ruolo chiave nel successo di questa piattaforma modulare di test HIL, che ha permesso il collaudo dei componenti, la stima dei livelli di potenza e la validazione degli algoritmi di gestione della potenza e pianificazione dei percorsi».
Il gruppo ha usato MapleSim anche come tool chiave in una parte preliminare del progetto per sviluppare una soluzione completa per il sistema di gestione della potenza di rover autonomi. MapleSim è stato utilizzato per sviluppare rapidamente modelli multidominio ad alta fedeltà dei sottosistemi del rover. L´obiettivo era quello di sviluppare un algoritmo di pianificazione del percorso che tenesse in considerazione la richiesta (e la generazione) di potenza del rover. Usando i modelli sviluppati, il pianificatore dei percorsi ha trovato il percorso ottimale fra il punto A e il punto B, in modo che il rover mantenesse il massimo livello di stoccaggio interno dell´energia, evitando nello stesso tempo ostacoli e sezioni del terreno a elevato rischio.
Il Dr. Khajepour e il suo gruppo sono riusciti a creare il modello matematico del rover a 6 ruote senza scrivere una sola equazione. »MapleSim è riuscito a generare automaticamente un set di equazioni ottimale per il sistema rover, che è stato essenziale nella fase di ottimizzazione», ha affermato.
Il Dr. Khajepour è stato positivamente colpito anche dall´interfaccia grafica di MapleSim. »In MapleSim, è possibile ricreare semplicemente il diagramma del sistema sul proprio schermo, utilizzando componenti che rappresentano il modello fisico. La capacità di vedere il modello, di vedere le parti in movimento, è molto importante per uno sviluppatore di modelli», ha concluso.
Figura 1 - Generazione automatica delle equazioni cinematiche
Figura 2 - Infrastruttura Hardware-in-the-Loop
Figure 3 - Modello di array solare in MapleSim
Richiedi maggiori informazioni…
