
www.industria-online.com
17
'20
Written on Modified on
AutomationWare lancia la nuova linea di azionamenti AW-Motion
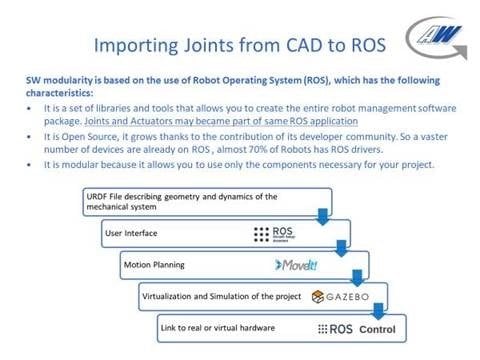
Automationware , azienda leader nello sviluppo di attuatori meccatronici e robotici, alla fine dell’anno, introdurra’ una nuova serie di azionamenti e motori (encoders) con varie tipologie di fieldbus per completare l’offerta dei propri prodotti. Da dicembre 2020,sara’ possibile acquisire una configurazione di attuatori completa di motori e azionamenti della nuovissima linea AW-Motion con potenze fino a 130 kW, e motorizzazioni equivalenti.

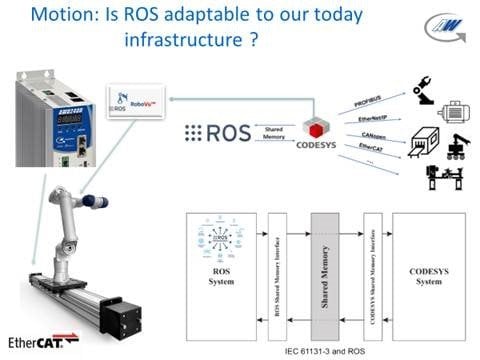
Sviluppato per le esigenze della moderna automazione, il servo drive AWD è progettato attorno ad una nuova CPU che consente grandi prestazioni, permette la connettività real-time tramite fieldbus come EtherCat, ProfiNet, ProfiBus, CanOpen e Modbus. Gli azionamenti AWD si distinguono per la grande flessibilità nel controllo motori, siano essi in AC o DC, sincroni o asincroni, rotativi o lineari. Saranno i primi azionamenti controllati da RoboVu , software di collegamento all’azionamento per controllare l’attuatore da Robot Operating System, è una applicazione Linux progettata e brevettata da Automationware. RoboVu rende semplice il collegamento da applicazioni ROS di movimentazione virtuali al bus EtherCat.
Primo Azionamento al Mondo controllabile da ROS ( con RoboVu)
Automationware ha inoltre aggiunto a questi azionamenti la possibilita’ di un controllo da Robot Operating System attraverso l’applicativo RoboVu (prodotto di AW che collega le applicazioni virtuali di ROS a bus di campo EtherCat). Ovviamente la gestione dell’azionamento prevede una gestione in real-time per seguire con precisione le cinematiche prodotte da Moveit ( Applicativo di cinematica ROS) . L’utilizzo di ROS permettera’ la definizione di robot di vario tipo, che potranno essere azionabili dalla nuova serie di Azionamenti AW-Motion.
AWD Drives
Le numerose funzionalità di questi azionamenti offrono una soluzione per la maggior parte delle applicazioni, siano esse di controllo di velocità, coppia, ma anche posizionamento, asse elettrico e controllo di pressione.

Il drive AWD permette come opzione la lettura del Resolver.
Il resolver è un dispositivo elettromeccanico utilizzato nelle applicazioni rotative per rilevare la velocità, la direzione e la posizione di un albero rotante. Ruotando solidalmente con l'albero motore genera un segnale sinusoidale che viene rilevato e convertito in digitale dal servodrive AWD garantendo una precisione di 16 bit.( 20 bit in futuro) AWD può generare un segnale di encoder incrementale simulato con risoluzioni selezionabili di: 256, 1024, 4096 e 16384ppr. Il resolver per la sua struttura fisica è sicuramente il trasduttore più adatto agli ambienti di lavoro gravosi e per questo è uno dei preferiti. Trasduttori di posizione R.
Il servodrive AWD nella configurazione base permette la lettura di Encoder Incrementali con o senza i sensori di Hall. L'Encoder Incrementale è un apparato opto-elettronico applicato al rotore del motore che produce dei segnali di onda quadra proporzionali allo spostamento angolare del suo asse rotante che vengono forniti al drive per gestire sia il motore che l'applicazione. L'encoder fornisce un'informazione di posizione relativa, non assoluta, pertanto è sempre necessaria una procedura di "homing" per determinare una posizione assoluta del sistema. Il segnale generato viene inviato al drive che ne esegue il conteggio estrapolandone in base alla frequenza i dati di spazio, velocità e accelerazione necessari per il controllo motore. La risoluzione dipende dal sensore e si misura in PPR, ovvero "impulsi al giro". Normalmente i motori AW utilizzano encoder incrementali da 2500 ppr.
Un encoder assoluto è progettato per fornire l'informazione di posizione assoluta del motore sul singolo giro o nel multigiro; Meccanicamente il principio di funzionamento è simile ad un encoder incrementale, il cui disco ha inciso un codice univoco che permette l'identificazione di ciascuna posizione angolare dell'asse. Quindi è sempre possibile conoscere esattamente la posizione dell'asse anche da fermo, senza necessità di eseguire una procedura di "homing" per determinarne la posizione assoluta. Il segnale digitale inviato all'azionamento o al CNC è un protocollo seriale. SSI è il protocollo seriale aperto gestito dal drive AWD. La risoluzione degli encoder assoluti viene solitamente definita in "conteggio per giro" (cpr). L'encoder per le informazioni multigiro può utilizzare un sistema meccanico (più affidabile e costoso) o può memorizzare il numero dei giri su una memoria alimentata da una batteria. AW utilizza un encoder assoluto SSI di tipo meccanico con 17 bit di risoluzione (131072cpr) nel singolo giro e 12 bit (4096 giri) per il multigiro.
La funzione Safe Torque-Off (STO) del drive AWD è costituita da un circuito elettrico ridondante progettato per portare un azionamento ad uno stato di sicura assenza di coppia. E' una funzione utilizzata per prevenire la rotazione inattesa del motore in caso di emergenza senza l'obbligo di sezionare l'alimentazione di potenza. Quando la funzione STO è attivata, il servodrive ed il motore sono in uno stato di sicurezza funzionale ovvero vi è impossibilità di produrre una rotazione attiva dell’albero motore o se in moto si arresta per inerzia. Il circuito di sicurezza implementato nel drive AWD è realizzato e certificato in conformità alla norma IEC EN 61800-5-2, con arresto in categoria 0, e con riferimento alla norma IEC61508 per il livello SIL3. La categoria di arresto 0 è conseguita con lo scollegamento immediato dei componenti elettronici (IGBT) responsabili della energizzazione del sistema, che determina un arresto non controllato dell'asse, per inerzia. E' consuetudine nelle applicazioni ove non è presente un drive equipaggiato con STO, mettere in sicurezza il sistema sezionando la potenza tramite un teleruttore di adeguata portata. Utilizzando lo STO è possibile eliminare il teleruttore con un beneficio economico, con un risparmio di spazio nel quadro ed ottenendo un livello di integrità di sicurezza maggiore.
Con il nome di "fieldbus" o in italiano "bus di campo" si identificano una serie di protocolli per reti industriali, standardizzati dalle normative IEC 61158, usati per il controllo e la comunicazione in tempo reale di un complesso sistema automatizzato. Un complesso sistema industriale automatizzato, come ad esempio una linea automatica di produzione di biscotti, per funzionare deve scambiare informazioni con diversi livelli di priorità e tempistiche tra le varie parti che lo compongono quali ad esempio HMI, PLC, sensori e servodrive. Mentre per eseguire un'interpolazione tra più assi è necessario che i drive si sincronizzino con tempistiche inferiori a 1ms, per la gestione di un posizionamento possono bastare tempi di 10ms mentre per l'invio di un avvenuto posizionamento da visualizzare su un HMI si potrà attendere anche 100ms. Ecco che i vari bus di campo implementano regole per garantire il "determinismo" e "l'isocronia", ovvero rispettivamente la capacità di servire una richiesta in un tempo limitato e noto a priori (massima latenza nota) e di garantire un comportamento strettamente ripetitivo nel tempo (basso jitter). Storicamente i fieldbus sono nati attorno alla struttura hardware seriale come la RS485. Tra i fieldbus più noti troviamo il ModBus, il CanOpen ed il ProfiBus. Ma negli ultimi anni si sono imposti i bus su base Ethernet come EtherCat e ProfiNet, preferiti per via della maggior velocità e dei costi limitati dei componenti Ethernet. Il servodrive AWD offre un ampia gamma di fieldbus sia seriali che su base Ethernet quali il Modbus RTU e TCP*, il CanOpen CiA 402, il Profibus DPV0, l'EtherCat CoE ed il ProfiNet RT e IRT.
CALIPER è lo strumento software progettato per rendere facile la calibrazione del vostro servodrive e motore tramite sistemi operativi Microsoft Windows. Un apposita interfaccia grafica estremamente intuitiva, velocizza e rende ancor più semplice l'accesso all'intera serie di funzioni di tutti i servoazionamenti AW. Oltre a selezionare le applicazioni, salvare e caricare i dati, Caliper include un potente oscilloscopio professionale, strumenti di autofasatura, riduzione automatica del cogging, observer per la riduzione delle vibrazioni, Fieldbus Analizer e molte altre applicazioni per aiutarvi a regolare al meglio le vostre applicazioni. La comunicazione avviene tramite una veloce porta
Micro USB 2.0 pertanto non sono necessari speciali cavi o convertitori seriali.

Per informazioni contattare This email address is being protected from spambots. You need JavaScript enabled to view it. o visitate il sito web www.automationware.it
Richiedi maggiori informazioni…
